近期,我校国家数学与交叉科学中心(合肥)图形与几何计算实验室(http://gcl.ustc.edu.cn)在计算几何及机器人自动三维重建领域取得了一系列重要研究进展。有三篇论文被计算机图形学领域顶级会议Siggraph 2018录用(第一作者和第一单位均为我校),且全文发表在该领域唯一的一区TOP期刊ACM Transactions on Graphics (2018年第4期)上。
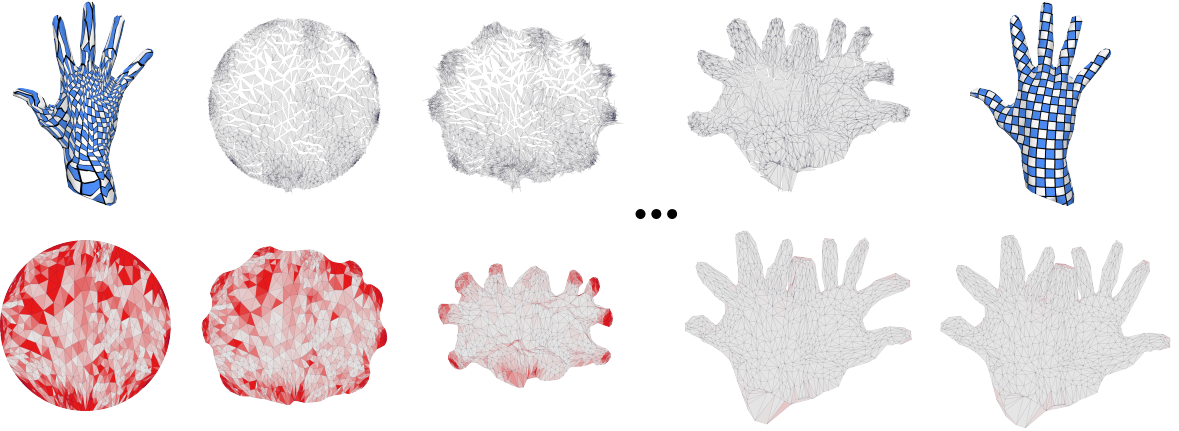
第一篇论文提出了一种新颖高效的基于非线性能量优化的参数化方法,优化性能远优于现有的方法。与以往方法不同的是,该方法不直接对最终目标能量进行优化,而是先在当前参数化三角形和理想目标之间进行插值得到中间参考目标,从而优化中间参考目标与当前参数化之间的扭曲能量。当扭曲能量降低到一定程度,再优化理想目标与参数化三角形之间的扭曲。通过二万多个模型的测试结果表明,该算法明显地加速了能量下降速度,具有非常好的鲁棒性。我校为该文的唯一完成单位,第一作者为数学学院刘利刚教授,通讯作者为数学学院特任副研究员傅孝明老师,主要参与同学叶春阳和倪瑞祺分别为数学学院二年级硕士生和四年级本科生。此工作得到了国家自然科学基金数学天元基金和国家自然科学基金的支持。
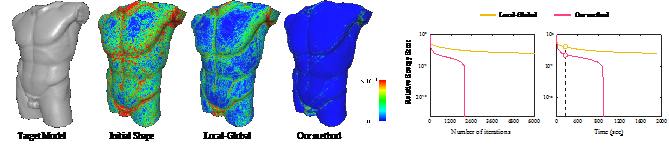
在几何处理与物理仿真计算中,需要求解一系列带约束的优化问题。现有的优化算法通常采用交替求解的思路,即先将局部单元投影到几何约束可行集(Local),然后求解一个全局线性系统(Global),交替迭代直至收敛。但现有方法存在着收敛速度慢的缺点。第二篇论文提出将安德森加速算法应用到Local-Global迭代求解算法上,将经典的迭代法看成固定点迭代问题,使得迭代序列在更少的迭代次数内收敛到最优解;该文还提出了一种简单有效的策略,在只增加较小时间代价的情况下保证目标优化能量单调下降,从而提高了安德森加速算法的稳定性。我校是该论文的第一完成单位和通讯作者单位,第一作者为数学学院二年级硕士生彭悦,通讯作者为数学学院副教授张举勇老师。该工作的合作单位包括英国卡迪夫大学。此工作得到了国家重点研发计划和国家自然科学基金的支持。
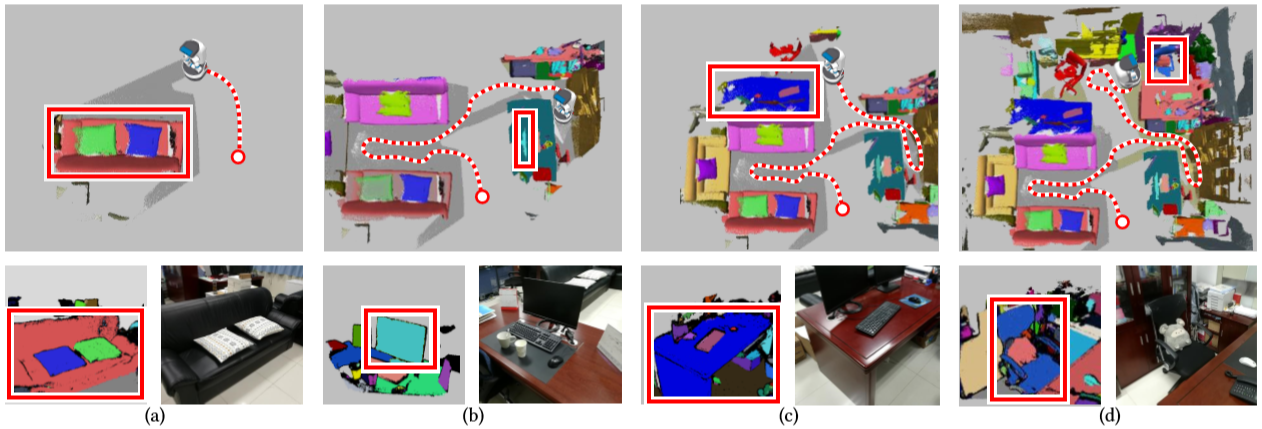
利用移动机器人对未知室内场景进行自主三维扫描与重建是机器人与计算机图形学领域共同关注的重要研究方向。相比于人手持扫描,机器人自动扫描具有不易疲劳、稳定性好、控制精度高等优点。第三篇论文提出了一种全新的自主场景三维重建的方法,通过为自动扫描提供基于物体感知的引导,使得对未知场景的探索、重建和理解能在一次扫描规划中完成。该方法交替进行物体分析和基于物体感知的信息增益分析,从而为机器人的全局探索和局部扫描确定了下一个最佳物体以及下一个最佳视点。此外,该研究还针对不完全重建点云的语义理解问题,提出了通过多类图割最小化方法来同时求解物体分割和物体识别的新思路。虚拟与真实场景的实验结果展现了所提出方法的可行性和高效性。我校是该论文的第一完成单位,第一作者是数学学院刘利刚教授,主要参与同学夏熙和孙瀚为数学学院三年级硕士生。该工作的合作单位包括深圳大学和国防科技大学。此工作得到了国家自然科学基金数学天元基金和国家自然科学基金的支持。